Exploring the Human Brain Through Virtual Environment Interaction.
The NeuroRehab Lab
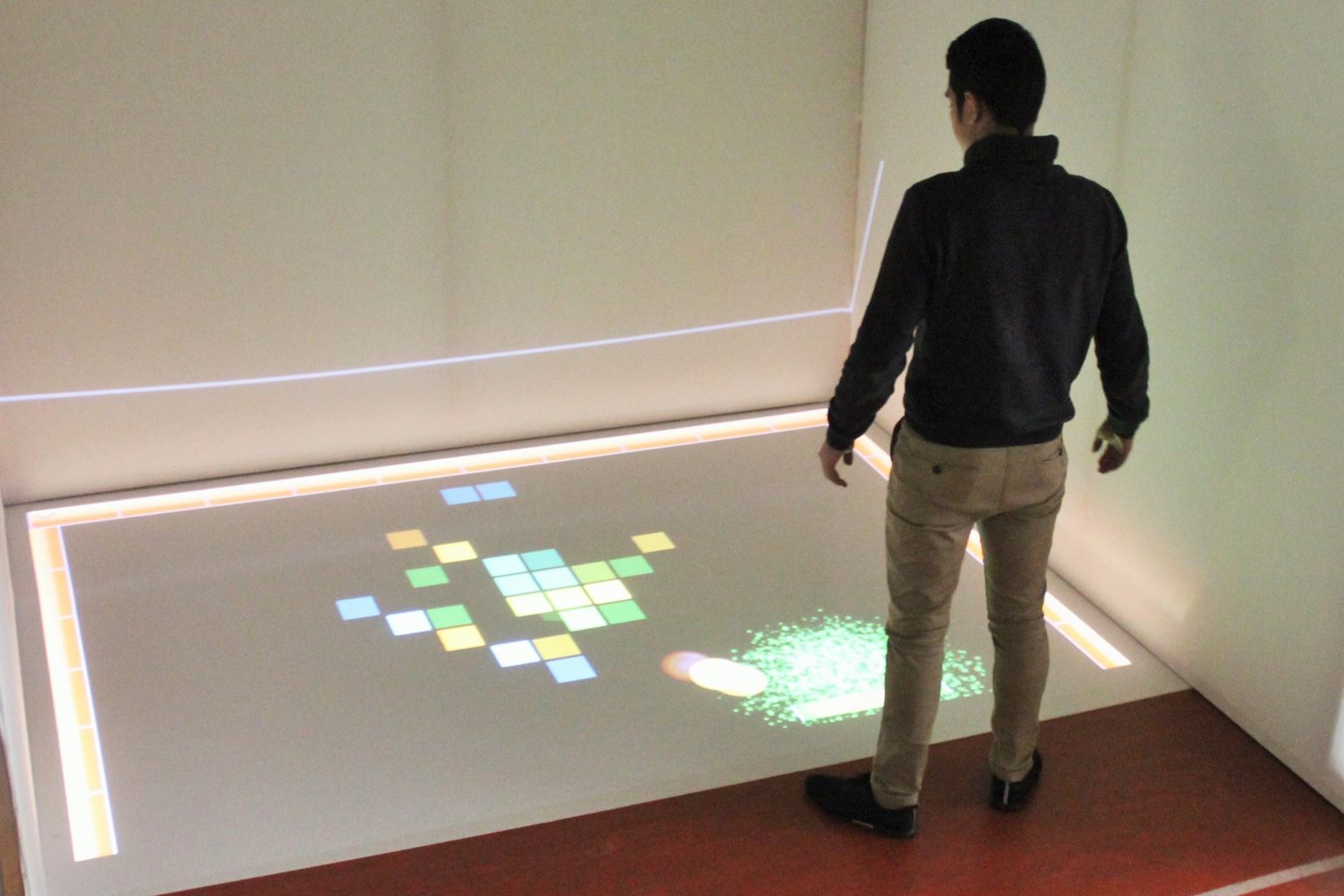
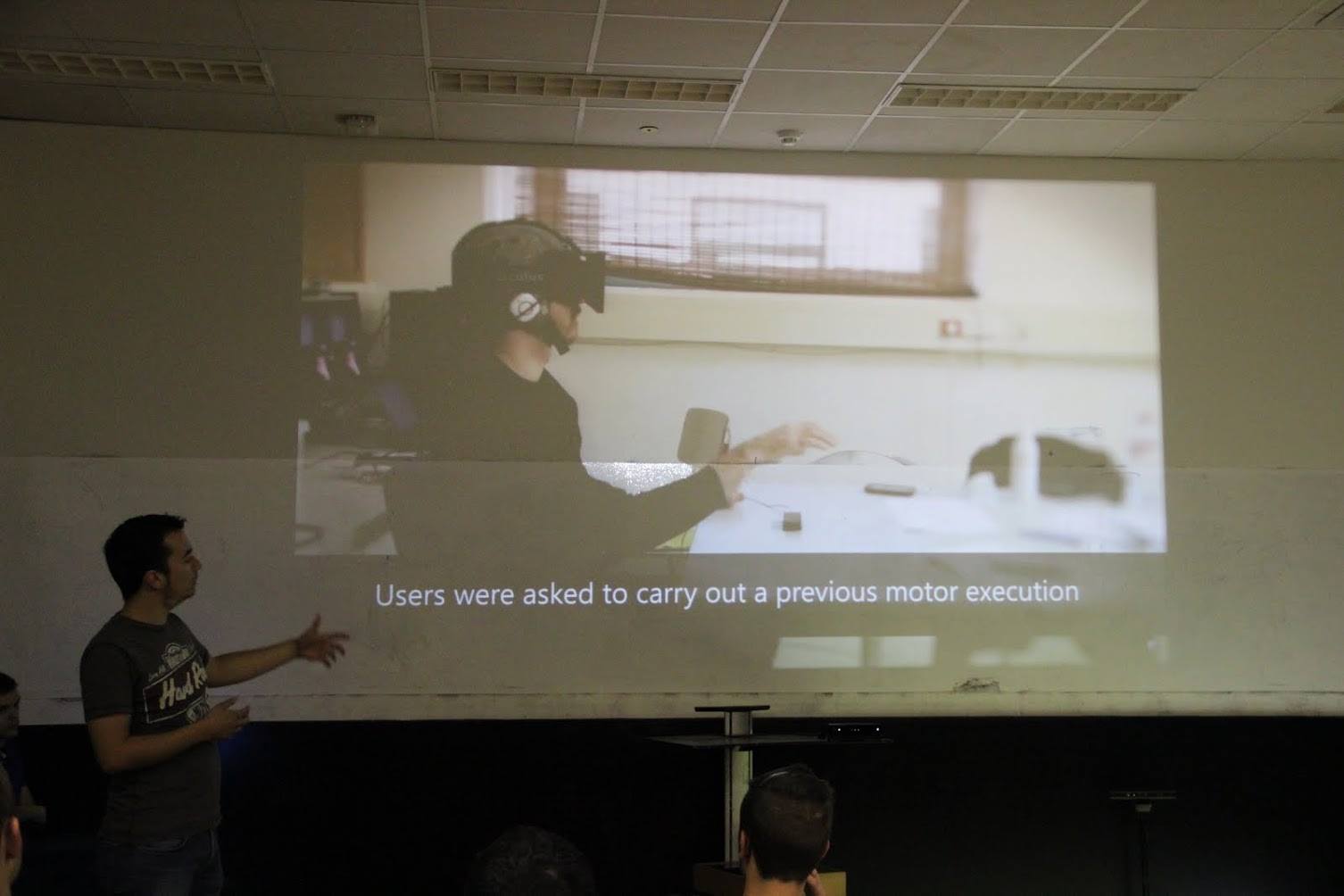
The NeuroRehabLab is an interdisciplinary research group of the University of Madeira that investigates the intersection of technology, neuroscience, and clinical practice to find novel solutions to increase the quality of life of those with special needs. We capitalize on Virtual Reality, Serious Games, and Brain-Computer Interfaces to exploit specific brain mechanisms that relate to functional recovery to approach motor and cognitive rehabilitation by means of non-invasive and low-cost technologies.








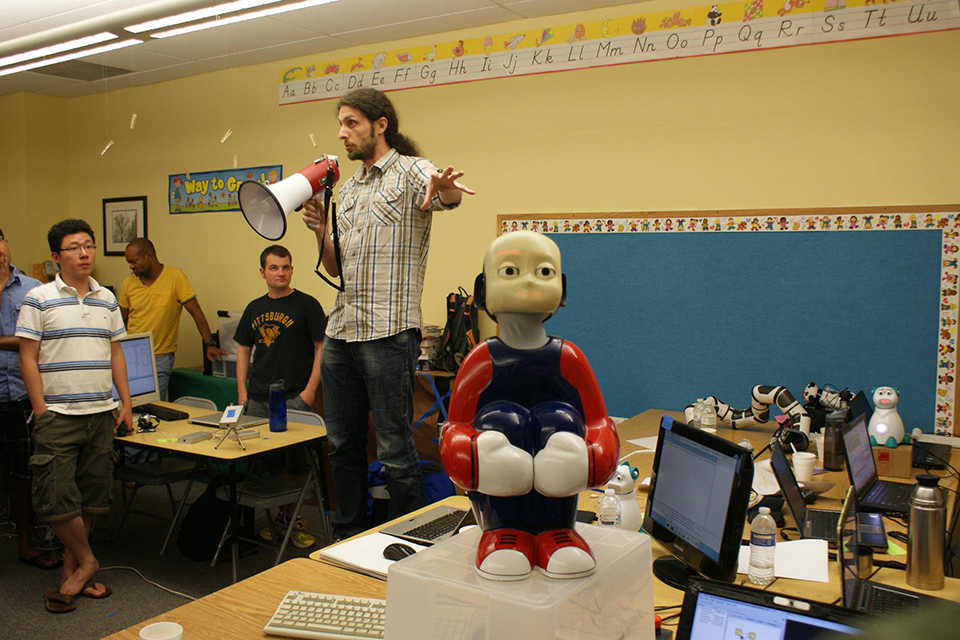


Interdisciplinary
Team of researchers ranging from clinical psychologists to computer scientist.
Collaborative
We have collaborated with multiple leading institutions around the world in developing studies and solutions.
Clinical Adaptation
Our tools and techniques are put into practice in real-world clinical applications.